Mudd Team Competes at RoboSub
August 14, 2019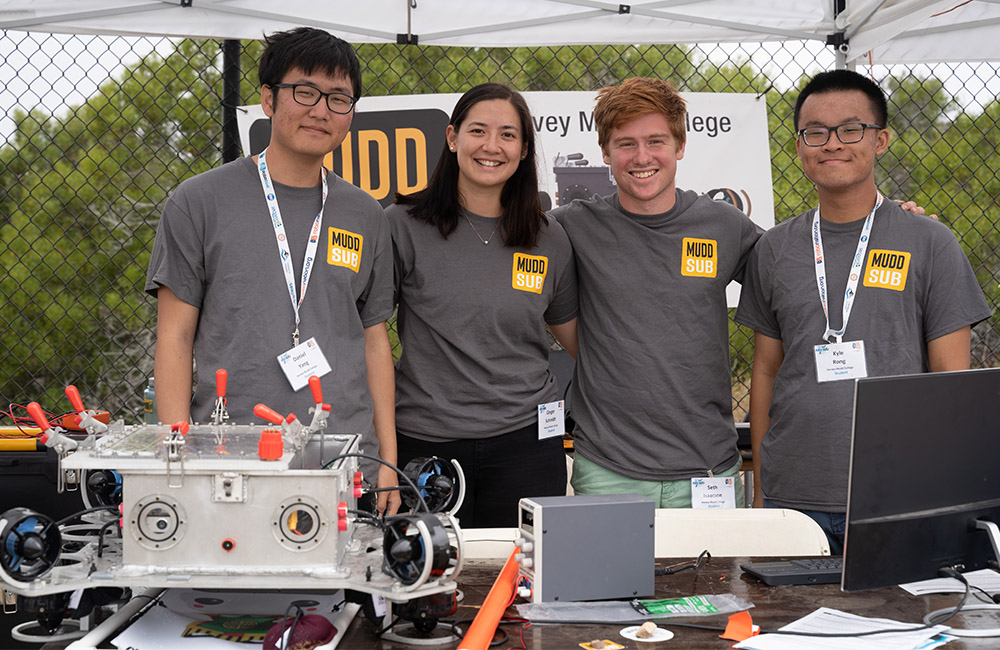
“More like a conference than a competition”
For the first time, Harvey Mudd College fielded an entry in the RoboNation RoboSub competition, which has been contested annually for 21 years. The Harvey Mudd Robotics Team, MuddSub, fielded its autonomous underwater vehicle (AUV), Alfie, against AUVs from other teams representing schools from 14 countries and several U.S. states.
Over the last academic year, the MuddSub team—currently Seth Isaacson ’21, Daniel Yang ’22, Kyle Rong ’22, Omari Matthews ’21, Ginger Schmidt ’21 and Diana Lin ’22—designed, built and programmed Alfie, with the intention of entering the competition. The team continued working on the AUV during summer, programming it to perform specific tasks. By the time the weeklong competition arrived, Alfie and the team were ready and felt they could be competitive. The competition was held at Transdec, a 38-foot deep, six-million gallon Naval testing pool in San Diego, where Navy divers assist the AUVs once they’re underwater. Team president Seth Isaacson shares his reflections of the experience.
 We had a great week at RoboSub. It’s a six-day competition and generally quite intensive, with the competition running 6:30 a.m. to 7 p.m. and the hotel pool opening for testing from 10 p.m. to 2 a.m.
We had a great week at RoboSub. It’s a six-day competition and generally quite intensive, with the competition running 6:30 a.m. to 7 p.m. and the hotel pool opening for testing from 10 p.m. to 2 a.m.
Day One
We had three test times. In the first, our main goal was to qualify for semifinals. To do that, we had to autonomously submerge and navigate through the gate about 15 meters away from the starting point. While this sounds like a simple task, it’s actually a somewhat challenging test of controls, as any more than the slightest drift will throw you off course.
We were very happy to qualify during our very first time slot and on our very first try. That meant we were the first team at the competition to qualify for semifinals, aside from the roughly 20 teams who completed a more challenging prequalification task before the competition.
In our second run, we got our vision system up and running. We were somewhat disappointed to find the water was much dirtier than we expected. However, with some slight tuning of thresholds we were still able to identify the obstacles. Plus, the lighting conditions improved over the next few days thanks to the 200-plus gallons of chlorine that were dumped into the pool.
Our final test of day one was somewhat of a disaster. When our start switch seemed to not be working, we had to pull the robot out to see what was wrong. We then lost ability to connect to our robot and noticed the computer had turned off. For a reason nobody was able to determine, it also never turned back on. This is one of the worst things to have fail at competition, and we were scrambling to find a solution.
 Our good friends on the BeaverAUV team (my former high school team) lent us a computer, but it would require a lot of work to integrate into our system. Luckily, the team from Carnegie Mellon (another new team) had a backup part for our computer which allowed us to keep using it. It was extremely generous of them to lend it to us, and was just one of many examples of the incredible collaborative environment at RoboSub. We then had electrical engineers from a few other teams inspect our hardware to make sure we weren’t setting ourselves up to fail again.
Our good friends on the BeaverAUV team (my former high school team) lent us a computer, but it would require a lot of work to integrate into our system. Luckily, the team from Carnegie Mellon (another new team) had a backup part for our computer which allowed us to keep using it. It was extremely generous of them to lend it to us, and was just one of many examples of the incredible collaborative environment at RoboSub. We then had electrical engineers from a few other teams inspect our hardware to make sure we weren’t setting ourselves up to fail again.
Days Two, Three and Four
Day two was occupied by smaller, related hardware faults, but ultimately we only lost a day to what could have been a much worse problem. Day three had some less eventful tests and data collection which was much needed to improve our vision algorithms.
Day four was the first of two days of semifinals. Each qualifying team has one run on each day. Typically, only about half of teams make it to this stage, but this year was especially strong with 40 out of 56 teams advancing. In our run, our vision system was successfully able to get us through the gate with a random starting angle from the dock (for extra points), then we moved on to attempt the buoy task. In this task, the AUV must bump each of the buoys, which is substantially harder than it sounds.
Our vision system worked flawlessly, but we had misjudged the depth we needed to run at and thus missed over the top. No worries, we still had day five.
 Day Five
Day Five
Our second semifinal run was a bit more disappointing. While our gate task worked flawlessly (starting at a random angle, identifying the smaller side of the divided gate and then spinning for style points), due to a sign error in the code, we never got ourselves in front of the buoys. Thus, Alfie was going to head into a wall, and we had to ask the diver to stop it. In the 15-minute run, we were unable to find the source of this error.
Day Six
Luckily, we qualified for a wildcard slot on day six, during which we managed to hit our buoy! It wasn’t enough to qualify for finals, but it meant the robot accomplished all it reasonably could have, given the onboard hardware, so we were really happy. After that, it was all about watching the finals and planning for next year.
There were so many highlights over the week, not the least of which were the strong connections we made with other teams, especially Carnegie Mellon, which had a profound impact on our overall experience. In addition to the mutual assistance, friendship and fun that provides, we’re very excited to continue collaborating with them throughout the school year. We hope to work together to build a realistic simulator of the RoboSub pool (which will benefit both teams) and to collaborate on designs of the RF signal processing boards needed for the hydrophones task. Both are notoriously tricky things which we think we have a better chance of succeeding at if we work together.
All robotics competitions have a collaborative feel, but for me nothing has matched this experience at RoboSub. As intended by the organizers of the competition, except for the scoreboard, it really feels more like a conference than a competition.
Follow the MuddSub team on Twitter @MuddSub, and visit the Harvey Mudd Robotics Team website.
Mudd Magazine