NSF Grant Enables Engineers and Biologists to Study Migratory Populations
September 8, 2014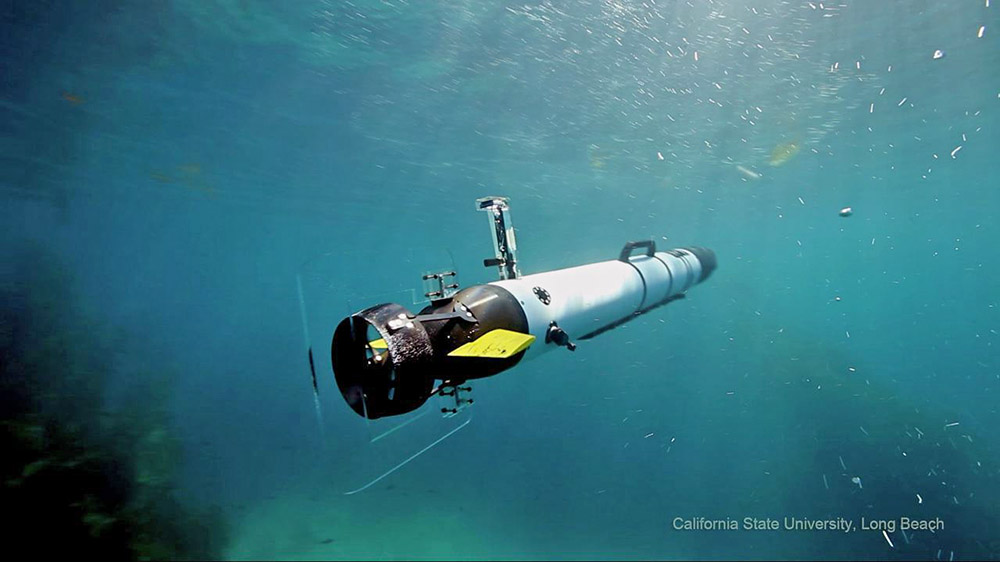
The natural, periodic migration patterns of humans, animals, insects and even bacteria provide us with information essential in making decisions that affect our environment, health, finances and safety.
Seeking to better understand these movements, Harvey Mudd Associate Professor of Engineering Chris Clark has teamed with biologist Chris Lowe of California State University, Long Beach and student researchers to develop a mobile, multi-robot sensing system capable of monitoring individuals and populations that share common behaviors resulting in periodic movement patterns. The team uses autonomous underwater vehicles (AUVs; such as the one pictured) to track and model multiple fish with multiple robots. The quantity and resolution of the motion data, of both individuals and populations, will be the first of its kind. Their research is funded by a continuing three-year grant from the National Science Foundation.
“The data will allow biologists to see motion patterns at a fine scale as well as characterize motion of not just one fish, but multiple individuals within a school (population of individuals),” says Clark. “Ecologically, the tracking of fish and monitoring of economically valuable fishes is of major significance.”
Undergraduate researchers in Clark’s Lab for Autonomous and Intelligent Robotics (LAIR) and CSULB marine biologists have long tracked sharks and other food fish off California’s Catalina Island, though until recently, the technology has been limited to tracking individuals within a population. Tracking entire populations—which offers a clearer overall picture of movement patterns—has been challenging, particularly within marine habitats.
Clark and Lowe’s multi-AUV approach leverages periodic mathematical models to track large numbers of fish and see motion patterns in greater detail. The system offers better sensor coverage, greater robustness against failure, high-resolution measurements, online adaptability and the ability to sample in dangerous or remote locations. Clark believes such a system can provide previously unobtainable observations on animal movement and predictive behavior.
“While there have been a variety of new mathematical tools for identifying patterns of movement across varying spatial and temporal scales, the tracking technology itself has limited the rate at which new data can be acquired,” says Clark. “Proposed here is the development and application of new autonomous multi-robot systems equipped with sensors for detection, motion modeling and following of individuals so that periodic behavior patterns of a mobile population can be measured.”
The broader impacts of this multidisciplinary work include a variety of applications, such as monitoring oil spills, securing ports and tracking varied species that follow periodic motion patterns, including insects, birds and whales. The research will be shared with local students in diverse communities, submitted to peer-reviewed journals and posted on lab websites. The models, techniques and data pertaining to fish behavior relative to heavily contaminated habitats will be presented at marine conservation meetings.
The team will collaborate with Los Angeles Port Police as they explore new applications of multi-AUV-based radiation detection and ship hull inspection.
Clark’s teaching and research interests are in autonomous systems, including underwater robots and multi-robot systems. This project builds on Clark’s previous NSF-funded work, in which researchers and students used underwater robots to track sharks and provide data to marine scientists.
See the LAIR website for more information about Clark’s research.
Mudd Magazine