HMC Students Use Robots to Map Cisterns in Malta
March 19, 2013
Mapping a cistern in Malta with an underwater robot
Four Harvey Mudd College students are spending their spring break using underwater robots to explore ancient water systems and marine caves in Malta and Sicily.
Ben Chasnov ’16, Alistar Dobke ’14, Lauren Lieu ’13, Joshua Vasquez ’14 and engineering Professor Chris Clark will work with marine archeologist Dr. Timmy Gambin from the University of Malta, who studies ancient water supply. The students will investigate previously unexplored underwater sites, including ancient cisterns—underground water storage systems located beneath castles, fortresses and churches.
“They are different shapes, and some that we’ll visit go back to 3000 B.C.,” said Clark. “They are really cool structures, and you often can’t get people in them because the well, or entrance, is too narrow. So, we lower a robot in.”

Students use an underwater robot equipped with 2D scanning sonar
The team will deploy a small underwater robot equipped with a 2D scanning sonar device to view the structures and collect measurement ranges. The data will be used to create maps of the underground water systems.
Clark has been taking student teams to Malta for the past five years as part of a research program he co-founded while at Cal Poly San Luis Obsipo. Now that he has joined the HMC faculty, students from both schools are collaborating to advance the research.
During earlier trips, Cal Poly students stitched the sonar measurements together using a Photoshop-type program to create maps of the water systems. They also worked with Prof. Clark and Professors Zoe Wood and Jane Lehr (Cal Poly) to automate the mapping process with SLAM (Simultaneous Localization And Mapping) techniques.

Alistair Dobke ’14 tests the robot pre-trip
This year, the HMC team has been working on new algorithms to piece the measurements together automatically and enable the robot to do 3D mapping.
“We all have our own part, but we’re working together,” said Chasnov. “We’re working on the software to collect the data to make scans of the underwater cisterns and caves. That will be the most exciting part of the trip—exploring the archeological places and applying what we learned in class to the real world.”
Dobke and Chasnov built new control software that allows two sonars to scan in different directions simultaneously to make full 3D maps. It also allows the robot to localize itself in the space.
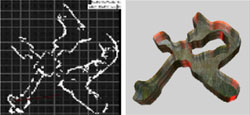
Sonar data and visualization of a cistern beneath the Tas Silg temple site in Malta
“I’m really excited about working out in the field and on some cool archeological sites,” said Dobke. “I’ve been working on the underlying control software for all the hardware we are using, so I’ll be making sure everything is working and taking some data while we are there.”
Lieu is looking at new algorithms to take that software and fuse it properly into the system, and Vasquez developed an idea for a new sensor. The whole team will be working together to integrate a new inertial measurement unit system (IMU) into the robot and to refine the data collection process.
While the HMC students work on the robotics mapping, the Cal Poly students will create computer graphics applications to construct and visualize geometric models of the underwater sonar data.

Malta
The research helps Maltese archeologists better understand the development of Malta’s ancient water storage systems, but its impact is much broader. The robotics technology the students are developing has a wide range of applications including oceanography, biology, naval defense and space exploration.
“Any time you want to do remote inspection of something, this is really helpful. Anything that is too far, deep or dangerous for people,” said Clark. “The core algorithms are used all over the place in robotics.”
The technology is even being applied in elderly care. Engineers are working on intelligent walkers, which use the same sensors to map the homes of the elderly to help them navigate safely, and developing robots that can search for injured people.
Clark created the International Computer Engineering Program (ICEX) with co-founder Dr. Christine Victorino (now at Pitzer College) to give students an opportunity to apply their technical knowledge in an international context, to learn and to increase global citizenship across campus. While in Malta, the students will also visit a Maltese elementary school and give a robotics lesson.
- Follow the students on their Malta 2013 blog
- Learn more about the Malta cistern project
- Dr. Clark’s research lab the LAIR
Mudd Magazine